Dynamics
Newton's laws
The acceleration of an object is directly proportional to the net force acting on it, and inversely proportional to its mass.
For every action, there is an equal and opposite reaction. This gives rises to forces like friction, normal and tension forces.
Friction is a force that opposes the motion of an object. It is given by:
Where is the coefficient of friction and is the normal force experienced by the object.
Conservative forces are forces that do not depend on the path taken by an object. They also have no lost in energy. They include:
- Gravitational force
- Elastic force
- Electric force
Inertia force is the preceived force from the perspective of an accelerating object.
For a person in an elevator accelerating upwards at , the inertia force is downwards.
Motion
The following are the equations of motion:
- Average velocity:
- Average acceleration:
Where is the final velocity, is the initial velocity, is the acceleration, is the time, and is the displacement.
The following are the equations of motion for circular motion:
- Total acceleration:
- Accelerating cylinder/disk:
is the angular velocity, which describes change in angle over time\ is the tangential velocity and acceleration, which is tangential to any point on the radius\ is the centripetal acceleration and force, which are perpendicular to tangential quantities. They act on the object, hence they be seen as normal forces.\ is the total acceleration, which is the resultant of and
The direction of the angular velocity is given by the right-hand rule. If the fingers of the right hand curl in the direction of rotation, the thumb points in the direction of the angular velocity.
The instantaneous center of zero velocity is the point on a rotating object that has zero velocity. The velocity is perpendicular to the radius (edge) at that point.
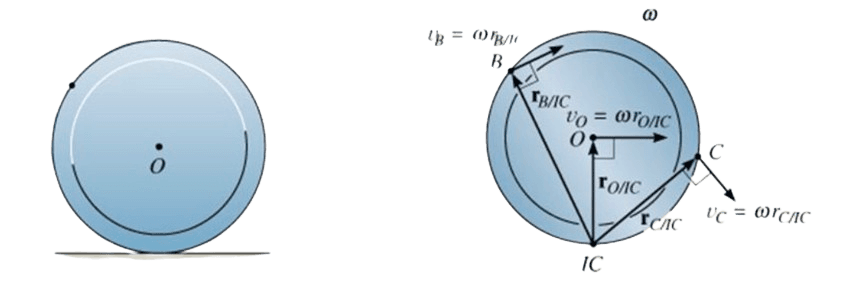
The velocity at any point is given by:
Where is the distance from the IC.
Momentum and impulse
Momentum is the product of an object's mass and velocity. It is a vector quantity.
The principle of conservation of momentum states that the total momentum of a system remains constant if no external forces act on it.
The angular momentum about a point is given by:
The coefficient of restitution is a measure of how much kinetic energy is conserved in a collision. It is given by:
Where and are the final velocities, and and are the initial velocities.
- is a perfectly elastic collision
- is a perfectly inelastic collision
- is a (partially) elastic collision
Vibrations
Simple harmonic motion
The following are the equations of motion for simple harmonic motion:
- Where is the amplitude. represents the angle of which the motion starts. ( for from to )
The natural frequency of a spring mass system is the frequency at which the system oscillates when displaced from equilibrium.
Where is the frequency, is the spring constant, and is the mass.
Spring mass system
Hooke's law states that the force required to extend or compress a spring is directly proportional to the extension or compression.
Where is the force, is the spring constant, and is the extension or compression.
Damping is the process of reducing the amplitude of an oscillation. It is given by:
Where is the damping force, is the damping coefficient, and is the velocity.
Critical damping is the minimum amount of damping required to prevent oscillation. It is given by:
The following gives the cases of damping:
- Underdamping:
- Overdamping:
- Critical damping: Critical damping gives the fastest return to equilibrium.
Energy, work and power
The following are the types of energy:
- Kinetic:
- Gravitational potential:
- Elastic potential:
- Friction:
- Rotational:
The energy of a spring-mass system is given by:
The principle of conservation of energy states that the total energy of a system remains constant if no external forces act on it.
This means in a system, energy is converted from one form to another. Use this fact to solve for unknowns.